МЕХАНИ́ЗМ
-

Рубрика: Технологии и техника
-

-

Скопировать библиографическую ссылку:
МЕХАНИ́ЗМ (от греч. μηχανή – машина), система тел, предназначенная для преобразования движения одного или нескольких твёрдых тел в требуемые движения др. тел. Если в преобразовании движения участвуют жидкие или газообразные тела, то М. называются соответственно гидравлич. или пневматическими. М. составляют важнейшую часть большинства машин, они применяются также в приборах, аппаратах и разл. технологич. устройствах.
Твёрдые тела, входящие в состав М. и участвующие в заданном преобразовании движения, называются звеньями. Неподвижное звено М. называется стойкой, соединение звеньев, допускающее их заданное относительное движение, – кинематической парой. Кинематич. пары разделяют на 5 классов в зависимости от количества ограничений, налагаемых на относительное движение звеньев (пара $k$-класса накладывает $k$ ограничений на движение твёрдого тела). Наибольшее распространение получили пары: вращательная (шарнир), поступательная (ползун и направляющая), винтовая (винт и гайка), цилиндрич. (сочетание вращательного и поступательного движений), сферич. (шаровой шарнир). Также в М. применяют кинематич. соединения, которые по характеру относительного движения заменяют кинематич. пару (напр., радиально-упорный шарикоподшипник заменяет вращательную кинематич. пару).
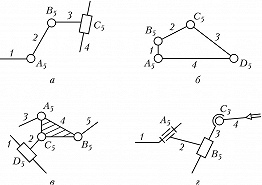
Система звеньев М., образующих между собой кинематич. пары, называется кинематической цепью. Кинематич. цепи М. могут быть (рис. 1) простые и сложные, разомкнутые и замкнутые, плоские и пространственные. Кинематич. цепь М. обеспечивает определённые движения звеньев относительно неподвижного звена (стойки) при заданном движении одного или нескольких звеньев. Для изучения строения М. и характера движения его звеньев составляется структурная схема, которая при задании размеров звеньев и др. параметров образует кинематич. схему М., позволяющую определять положение звеньев, их скорости и ускорения (см. Кинематика механизмов). На рис. 2 показаны чертёж и кинематич. схема поршневой машины (двигателя внутр. сгорания, компрессора и др.).
В каждом М. имеются входные (ведущие) и выходные (ведомые) звенья. Входному звену сообщается движение, преобразуемое М. в требуемое движение выходного звена. Для ведущего звена работа приложенных к нему внешних сил является положительной, для ведомого – отрицательной. Так, при работе поршневой машины (см. рис. 2) в качестве компрессора звено 1 является входным, звено 3 – выходным; если же она работает как двигатель внутр. сгорания, то ведущее и ведомое звенья меняются местами (3 – ведущее, 1 – ведомое).
Подвижность М. характеризуется числом степеней свободы, которое равно числу независимых переменных (обобщённых координат), определяющих положение кинематич. цепи М. относительно стойки. Существуют общие закономерности в структуре (строении) разл. М., связывающие число степеней свободы $W$ М. с числом звеньев и числом и видом его кинематич. пар. Эти закономерности носят название структурных формул М. При выводе структурной формулы пространственного М. для определения $W$ учитывается процесс соединения в кинематич. цепь звеньев, которые в свободном состоянии имели бы по 6 степеней свободы, но их движение ограничено в кинематич. парах (напр., кинематич. пара 5-го класса накладывает на относительное движение звеньев, образующих пару, 5 связей), т. е. $$W=6n-5p_5-4p_4-3p_3-2p_2-p_1+q,$$ где $n$ – число подвижных звеньев; $p_1, p_2, p_3, p_4, p_5$ – число кинематич. пар соответствующего класса; $q$ – число избыточных (повторяющихся) связей, которые дублируют др. связи, не уменьшая подвижности М., а только обращая его в статически неопределимую систему. Устраняют избыточные связи заменой некоторых кинематич. пар на более подвижные.
В общем виде эта формула, предложенная П. О. Сомовым и А. П. Малышевым, может быть представлена так: $$W=6n-\sum_ {i=1}^{i=5}ip_i+q_i,$$ где $i$ – номер класса кинематич. пары; $p_i$ – количество кинематич. пар $i$-го класса.
Для определения числа степеней свободы плоских М., в которых звенья имеют только 3 степени свободы, применяется формула Чебышева (1869): $$W=3n-2p_5-p_4.$$

Для определения положения всех звеньев М. некоторым из них задаются определённые параметры – одна или неск. обобщённых координат. Число таких звеньев, называемых начальными, равно числу степеней свободы М. На рис. 2 обобщённой координатой может быть угол $φ_1$, определяющий положение начального звена 1.
В рабочих машинах М. применяют для преобразования движения двигателя в требуемое движение исполнит. органа машины. В этом случае М. называются передаточными или передачами (см. Передача в машинах). В зависимости от вида звеньев различают рычажные, зубчатые, фрикционные, цепные, ременные и др. передачи. Каждая из видов передач имеет разновидности. Напр., зубчатая передача может быть с неподвижными осями зубчатых колёс, с подвижными (планетарная), с конич. колёсами и др.
Для выполнения работ в средах, недоступных или опасных для человека (подводные глубины, космос, атомные реакторы), применяются манипуляторы, основу которых составляют пространственные М. со многими степенями свободы. Манипуляторы также широко применяются в пром. роботах, позволяющих автоматизировать процессы обработки, монтажа и сборки изделий.
-
 Рис. 1. Виды кинематических цепей: а – простая разомкнутая плоская цепь; б – простая замкнутая плоская цепь; в – сложная разомкнутая плоская цепь; г – простая разомкнутая пространственная цепь; арабскими цифрами обозначены звенья механизма, латинскими буквами с индексами – кинематические пары соответствующих классов.
Рис. 1. Виды кинематических цепей: а – простая разомкнутая плоская цепь; б – простая замкнутая плоская цепь; в – сложная разомкнутая плоская цепь; г – простая разомкнутая пространственная цепь; арабскими цифрами обозначены звенья механизма, латинскими буквами с индексами – кинематические пары соответствующих классов. -
 Рис. 2. Чертёж (а) и кинематическая схема (б) механизма поршневой машины: 1 – коленчатый вал (кривошип); 2 – шатун; 3 – ползун; 4 – стойка; φ1 – независимая переменная, угол поворота кривошипа; A5, B5, C5, D5 – одноподвижные кинематические пары пятого класса.
Рис. 2. Чертёж (а) и кинематическая схема (б) механизма поршневой машины: 1 – коленчатый вал (кривошип); 2 – шатун; 3 – ползун; 4 – стойка; φ1 – независимая переменная, угол поворота кривошипа; A5, B5, C5, D5 – одноподвижные кинематические пары пятого класса.



