МЕХАТРО́НИКА
-

Рубрика: Технологии и техника
-

-

Скопировать библиографическую ссылку:
МЕХАТРО́НИКА [от меха(ника) и (элек)троника], область науки и техники, основанная на синергетическом объединении узлов точной механики с электронными, электротехническими и компьютерными компонентами, обеспечивающая проектирование и производство качественно новых модулей, систем и машин с интеллектуальным управлением их функциональными движениями. Термин «Мехатроника» (англ. «Mechatronics», нем. «Mechatronik») был введён японской фирмой «Yaskawa Electric Corp.» в 1969 году и зарегистрирован как торговая марка в 1972 году. Отметим, что в отечественной технической литературе ещё в 1950-х гг. использовался подобным же образом образованный термин – «механотроны» (электронные лампы с подвижными электродами, которые применялись в качестве датчиков вибраций и т. п.). Мехатронные технологии включают проектно-конструкторские, производственные, информационные и организационно-экономические процессы, которые обеспечивают полный жизненный цикл мехатронных изделий.
Предмет и метод мехатроники
Главная задача мехатроники как направления современной науки и техники состоит в создании конкурентоспособных систем управления движением разнообразных механических объектов и интеллектуальных машин, которые обладают качественно новыми функциями и свойствами. Метод мехатроники заключается (при построении мехатронных систем) в системной интеграции и использовании знаний из ранее обособленных научных и инженерных областей. К их числу относятся прецизионная механика, электротехника, гидравлика, пневматика, информатика, микроэлектроника и компьютерное управление. Мехатронные системы строятся путём синергетической интеграции конструктивных модулей, технологий, энергетических и информационных процессов, начиная со стадии их проектирования и заканчивая производством и эксплуатацией.
Синергия – это совместное действие, направленное на достижение общей цели. При синергетической интеграции компоненты должны быть слиты неразрывно и органически, поэтому мехатронная система обладает качественно новыми свойствами, которые не были присущи составляющим её частям (см. также Синергетика).

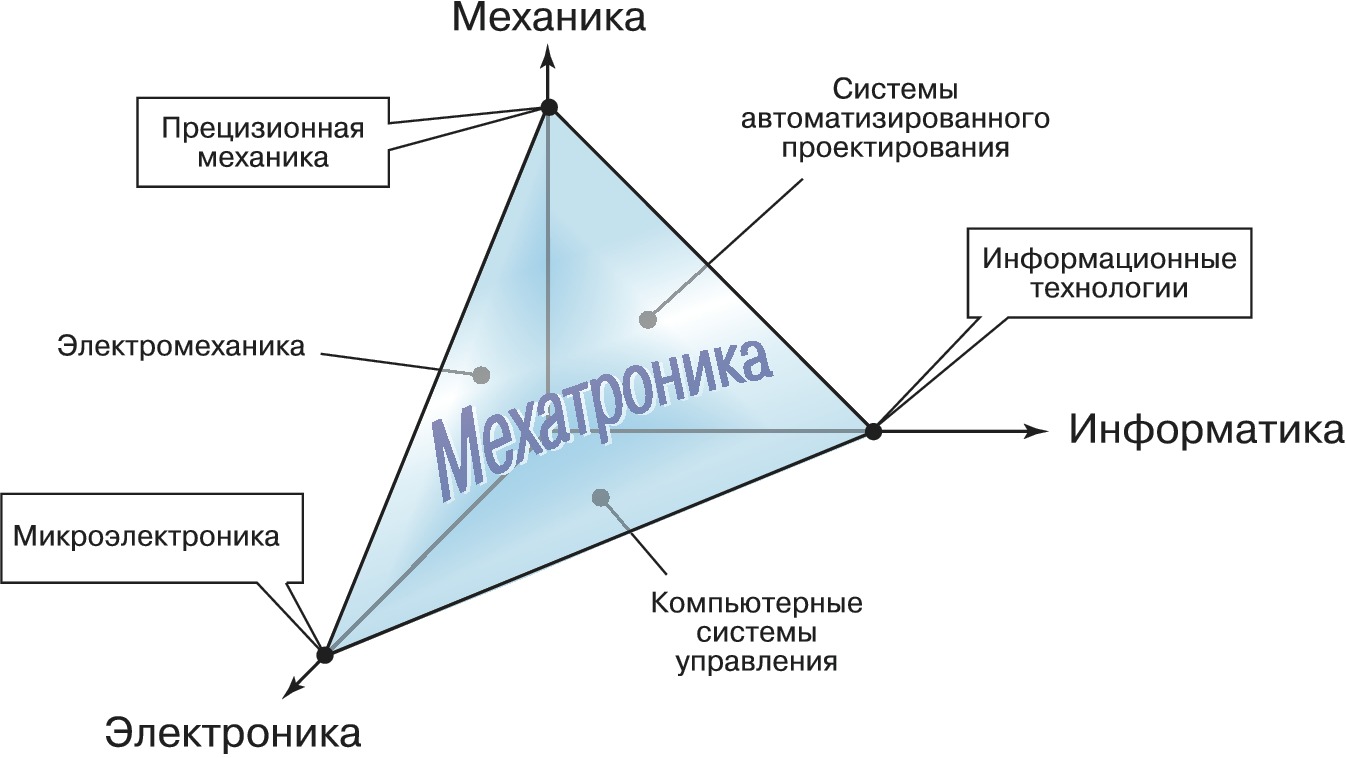
В 1970–80-х гг. три базисных направления – оси мехатроники (точная механика, электроника и информатика) интегрировались попарно, образовав три гибридных направления (на рис. 1 показаны боковыми гранями пирамиды). Это электромеханика (объединение механических узлов с электротехническими изделиями и электронными блоками), компьютерные системы управления (аппаратно–программное объединение электронных и управляющих устройств), а также системы автоматизированного проектирования (САПР) механических систем. Затем – уже на стыке гибридных направлений – возникает мехатроника, становление которой как нового научно-технического направления начинается с 1990-х гг.
Элементы мехатронных модулей и машин имеют различную физическую природу (механические преобразователи движений, двигатели, информационные и электронные блоки, управляющие устройства), что определяет междисциплинарную научно-техническую проблематику мехатроники. Междисциплинарные задачи определяют и содержание образовательных программ по подготовке и повышению квалификации специалистов, которые ориентированы на системную интеграцию устройств и процессов в мехатронных системах.
Принципы построения и тенденции развития
Развитие мехатроники является приоритетным направлением современной науки и техники во всём мире. В нашей стране мехатронные технологии как основа построения роботов нового поколения включены в число критических технологий РФ.
К числу актуальных требований к мехатронным модулям и системам нового поколения следует отнести: выполнение качественно новых служебных и функциональных задач; интеллектуальное поведение в изменяющихся и неопределённых внешних средах на основе новых методов управления сложными системами; сверхвысокие скорости для достижения нового уровня производительности технологических комплексов; высокоточные движения с целью реализации новых прецизионных технологий, вплоть до микро- и нанотехнологий; компактность и миниатюризация конструкций на основе применения микромашин; повышение эффективности многокоординатных мехатронных систем на базе новых кинематических структур и конструктивных компоновок.
Построение мехатронных модулей и систем основывается на принципах параллельного проектирования (англ. – concurrent engineering), исключения многоступенчатых преобразований энергии и информации, конструктивного объединения механических узлов с цифровыми электронными блоками и управляющими контроллерами в единые модули.
Ключевым принципом проектирования является переход от сложных механических устройств к комбинированным решениям, основанным на тесном взаимодействии более простых механических элементов с электронными, компьютерными, информационными и интеллектуальными компонентами и технологиями. Компьютерные и интеллектуальные устройства придают мехатронной системе гибкость, поскольку их легко перепрограммировать под новую задачу, и они способны оптимизировать свойства системы при изменяющихся и неопределённых факторах, действующих со стороны внешней среды. Важно отметить, что за последние годы цена таких устройств постоянно снижается при одновременном расширении их функциональных возможностей.
Тенденции развития мехатроники связаны с появлением новых фундаментальных подходов и инженерных методов решения задач технической и технологической интеграции устройств различной физической природы. Компоновка нового поколения сложных мехатронных систем формируется из интеллектуальных модулей («кубиков мехатроники»), объединяющих в одном корпусе исполнительные и интеллектуальные элементы. Управление движением систем осуществляется с помощью информационных сред для поддержки решений мехатронных задач и специального программного обеспечения, реализующего методы компьютерного и интеллектуального управления.
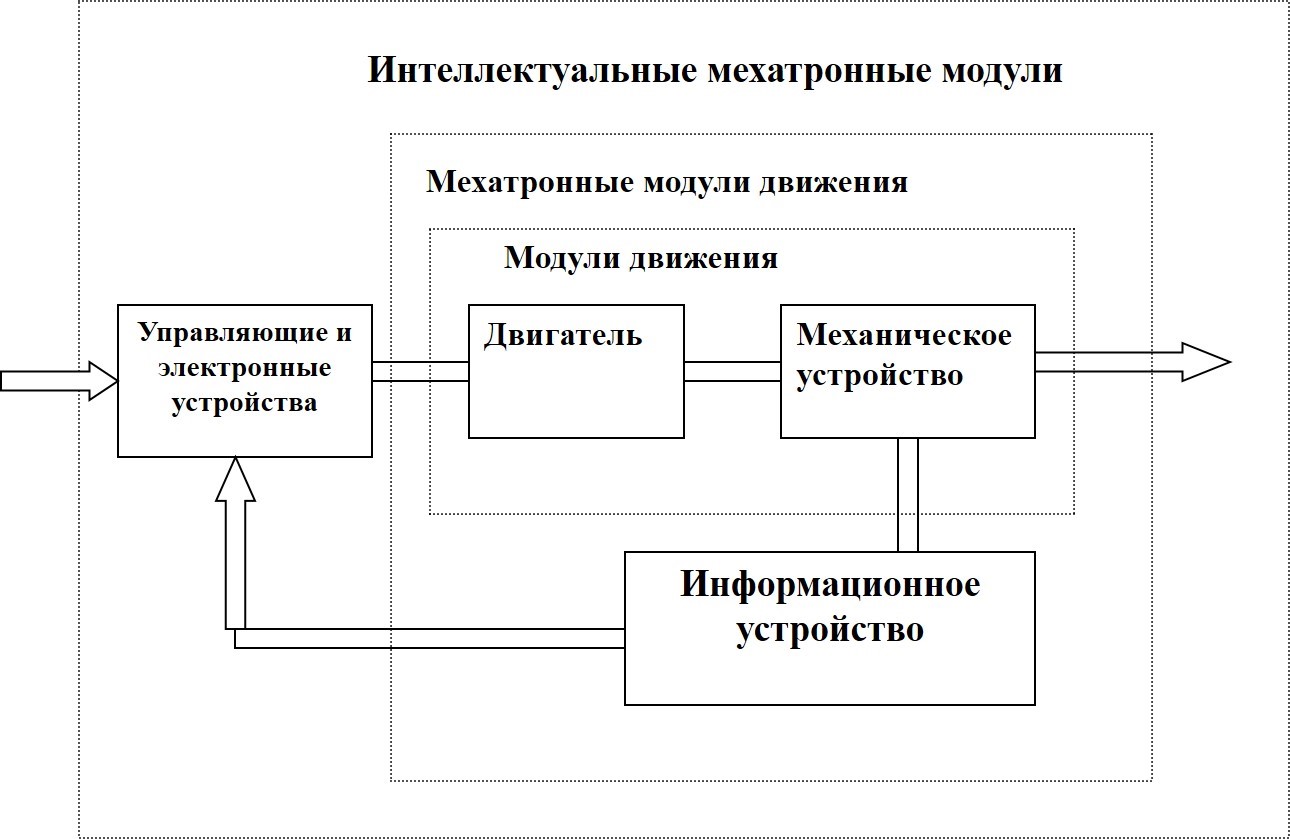
Классификация мехатронных модулей по структурным признакам представлена на рис. 2.
Модуль движения – конструктивно и функционально самостоятельный электромеханический узел, включающий в себя механическую и электрическую (электротехническую) части, который можно использовать как сепаратный блок, так и в различных комбинациях с другими модулями. Главным отличием модуля движения от общепромышленного электропривода является использование вала двигателя в качестве одного из элементов механического преобразователя движения. Примерами модулей движения являются мотор-редуктор, мотор-колесо, мотор-барабан, электрошпиндель станка.
Мотор-редукторы являются исторически первыми по принципу своего построения мехатронными модулями, которые стали серийно выпускать, и до настоящего времени находят широкое применение в приводах различных машин и механизмов. В мотор-редукторе вал является конструктивно единым элементом для двигателя и преобразователя движения, что позволяет исключить традиционную соединительную муфту, добиваясь таким образом компактности; при этом существенно уменьшается количество присоединительных деталей, а также затраты на установку, отладку и запуск. В мотор-редукторах в качестве электродвигателей наиболее часто используют асинхронные двигатели с короткозамкнутым ротором и регулируемым преобразователем частоты вращения вала, однофазные двигатели и двигатели постоянного тока. В качестве преобразователей движения применяются зубчатые цилиндрические и конические, червячные, планетарные, волновые и винтовые передачи. Для защиты от действия внезапных перегрузок устанавливают ограничители вращающего момента.

Мехатронный модуль движения – конструктивно и функционально самостоятельное изделие, включающее в себя управляемый двигатель, механическое и информационное устройства (рис. 2). Как следует из данного определения, по сравнению с модулем движения, в состав мехатронного модуля движения дополнительно встроено информационное устройство. Информационное устройство включает датчики сигналов обратных связей, а также электронные блоки для обработки сигналов. Примерами таких датчиков могут служить фотоимпульсные датчики (энкодеры), оптические линейки, вращающиеся трансформаторы, датчики сил и моментов и т. д.
Важным этапом развития мехатронных модулей движения стали разработки модулей типа «двигатель-рабочий орган». Такие конструктивные модули имеют особое значение для технологических мехатронных систем, целью движения которых является реализация целенаправленного воздействия рабочего органа на объект работ. Мехатронные модули движения типа «двигатель-рабочий орган» широко применяют в станках под названием мотор-шпиндели.
Интеллектуальный мехатронный модуль (ИММ) – конструктивно и функционально самостоятельное изделие, построенное путём синергетической интеграции двигательной, механической, информационной, электронной и управляющей частей.
Таким образом, по сравнению с мехатронными модулями движения, в конструкцию ИММ дополнительно встраиваются управляющие и силовые электронные устройства, что придаёт этим модулям интеллектуальные свойства (рис. 2). К группе таких устройств можно отнести цифровые вычислительные устройства (микропроцессоры, сигнальные процессоры и т. п.), электронные силовые преобразователи, устройства сопряжения и связи.
Применение интеллектуальных мехатронных модулей даёт мехатронным системам и комплексам ряд принципиальных преимуществ: способность ИММ выполнять сложные движения самостоятельно, без обращения к верхнему уровню управления, что повышает автономность модулей, гибкость и живучесть мехатронных систем, работающих в изменяющихся и неопределённых условиях внешней среды; упрощение коммуникаций между модулями и центральным устройством управления (вплоть до перехода к беспроводным коммуникациям), что позволяет добиваться повышенной помехозащищённости мехатронной системы и ее способности к быстрой реконфигурации; повышение надёжности и безопасности мехатронных систем благодаря компьютерной диагностике неисправностей и автоматической защите в аварийных и нештатных режимах работы; создание на основе ИММ распределённых систем управления с применением сетевых методов, аппаратно-программных платформ на базе персональных компьютеров и соответствующего программного обеспечения; использование современных методов теории управления (адаптивных, интеллектуальных, оптимальных) непосредственно на исполнительном уровне, что существенно повышает качество процессов управления в конкретных реализациях; интеллектуализация силовых преобразователей, входящих в состав ИММ, для реализации непосредственно в мехатронном модуле интеллектуальных функций по управлению движением, защите модуля в аварийных режимах и диагностики неисправностей; интеллектуализация сенсоров для мехатронных модулей позволяет добиться более высокой точности измерения, программным путём обеспечив в самом сенсорном модуле фильтрацию шумов, калибровку, линеаризацию характеристик вход/выход, компенсацию перекрёстных связей, гистерезиса и дрейфа нуля.
Мехатронные системы
Мехатронные системы и модули вошли как в профессиональную деятельность, так и в повседневную жизнь современного человека. Сегодня они находят широкое применение в самых различных областях: автомобилестроение (автоматические коробки передач, антиблокировочные устройства тормозов, приводные модули «мотор-колесо», системы автоматической парковки); промышленная и сервисная робототехника (мобильные, медицинские, домашние и другие роботы); периферийные устройства компьютеров и офисная техника: принтеры, сканеры, CD-дисководы, копировальные и факсимильные аппараты; производственное, технологическое и измерительное оборудование; домашняя бытовая техника: стиральные, швейные, посудомоечные машины и автономные пылесосы; медицинские системы (например, оборудование для робото-ассистированной хирургии, коляски и протезы для инвалидов) и спортивные тренажёры; авиационная, космическая и военная техника; микросистемы для медицины и биотехнологии; лифтовое и складское оборудование, автоматические двери в отелях аэропортах, вагонах метро и поездов; транспортные устройства (электромобили, электровелосипеды, инвалидные коляски); фото- и видеотехника (проигрыватели видеодисков, устройства фокусировки видеокамер); движущиеся устройства для шоу-индустрии.
Выбор кинематической структуры является важнейшей задачей при концептуальном проектировании машин нового поколения. Эффективность её решения во многом определяет главные технические характеристики системы, её динамические, скоростные и точностные параметры.
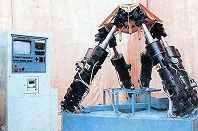
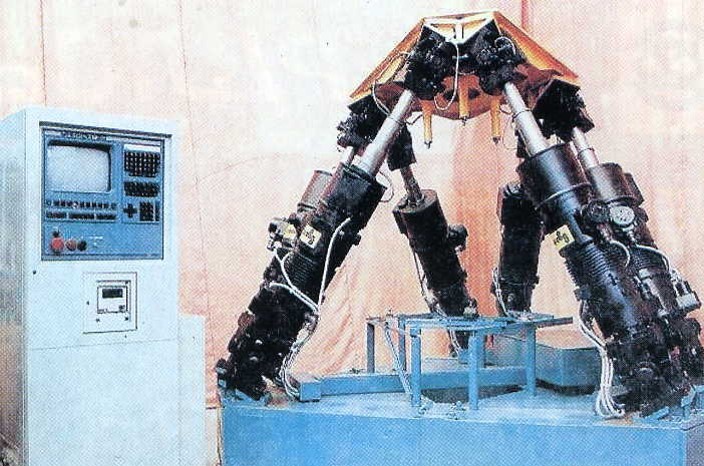
Именно мехатроника дала новые идеи и методы для проектирования движущихся систем с качественно новыми свойствами. Эффективным примером такого решения стало создание машин с параллельной кинематикой (МПК) (рис. 3).
В основе их конструктивной схемы лежит обычно платформа Гью-Стюарта (разновидность параллельного манипулятора, имеющая 6 степеней свободы; используется октаэдральная компоновка стоек). Машина состоит из неподвижного основания и подвижной платформы, которые соединены между собой несколькими стержнями с управляемой длиной. Стержни соединены с основанием и платформой кинематическими парами, которые имеют соответственно две и три степени подвижности. На подвижной платформе устанавливается рабочий орган (например, инструментальная или измерительная головка). Программно регулируя длины стержней с помощью приводов линейного перемещения, можно управлять перемещениями и ориентацией подвижной платформы и рабочего органа в пространстве. Для универсальных машин, где требуется перемещение рабочего органа как твёрдого тела по шести степеням свободы, необходимо иметь шесть стержней. В мировой литературе такие машины называются «гексаподы» (от греч. ἔξ – шесть).
Основными преимуществами машин с параллельной кинематикой являются: высокая точность исполнения движений; высокие скорости и ускорения рабочего органа; отсутствие традиционных направляющих и станины (в качестве несущих элементов конструкции используются приводные механизмы), отсюда и улучшенные массогабаритные параметры, и низкая материалоёмкость; высокая степень унификации мехатронных узлов, обеспечивающая технологичность изготовления и сборки машины и конструктивную гибкость.
Повышенные точностные показатели МПК обусловлены следующими ключевыми факторами:
в гексаподах, в отличие от кинематических схем с последовательной цепью звеньев, не происходит суперпозиции (наложения) погрешностей позиционирования звеньев при переходе от базы к рабочему органу;
стержневые механизмы обладают высокой жесткостью, так как стержни не подвержены изгибающим моментам и работают только на растяжение-сжатие;
применяются прецизионные датчики обратной связи и измерительные системы (например, лазерные), а также используются компьютерные методы коррекции перемещений рабочего органа.
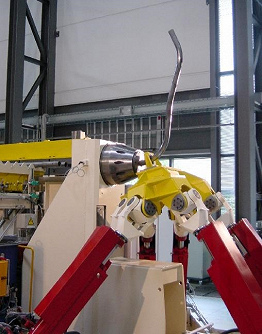
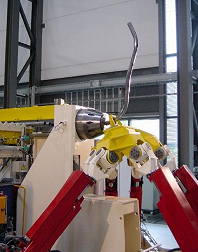
Благодаря повышенной точности МПК могут применяться не только как обрабатывающее оборудование, но и в качестве измерительных машин. Высокая жёсткость МПК позволяет применять их на силовых технологических операциях. Так, на рис. 4 показан пример гексапода, выполняющего гибочные операции в составе технологического комплекса «HexaBend» для производства сложных профилей и труб.
Компьютерное и интеллектуальное управление в мехатронике
Применение ЭВМ и микроконтроллеров, реализующих компьютерное управление движением разнообразных объектов, является характерной особенностью мехатронных устройств и систем. Сигналы от разнообразных датчиков, несущие информацию о состоянии компонентов мехатронной системы и приложенных к этой системе воздействий, поступают в управляющую ЭВМ. Компьютер перерабатывает информацию в соответствии с заложенными в него алгоритмами цифрового управления и формирует управляющие воздействия на исполнительные элементы системы.
Компьютеру отводится ведущая роль в мехатронной системе, поскольку компьютерное управление даёт возможность достичь высокой точности и производительности, реализовать сложные и эффективные алгоритмы управления, учитывающие нелинейные характеристики объектов управления, изменения их параметров и влияние внешних факторов. Благодаря этому мехатронные системы приобретают новые качества при увеличении долговечности и снижении размеров, массы и стоимости таких систем. Достижение нового, более высокого уровня качества систем благодаря возможности реализации высокоэффективных и сложных законов компьютерного управления позволяет говорить о мехатронике как о возникающей компьютерной парадигме современного развития технической кибернетики.
Характерным примером мехатронной системы с компьютерным управлением является прецизионный следящий привод на основе бесконтактной многофазной электрической машины переменного тока с векторным управлением. Наличие группы датчиков, в том числе высокоточного датчика положения вала двигателя, цифровых методов обработки информации, компьютерной реализации законов управления, преобразований, основанных на использовании математической модели электрической машины, и быстродействующего контроллера позволяет построить прецизионный быстродействующий привод, обладающий сроком службы до 30–50 тысяч часов и более.
Компьютерное управление оказывается весьма эффективным при построении многокоординатных нелинейных мехатронных систем. В этом случае ЭВМ анализирует данные о состоянии всех компонентов и внешних воздействиях, производит вычисления и формирует управляющие воздействия на исполнительные компоненты системы с учётом особенностей её математической модели. В результате достигается высокое качество управления согласованным многокоординатным движением, например, рабочего органа мехатронной технологической машины или мобильного робота.
Особую роль в мехатронике играет интеллектуальное управление, которое является более высокой ступенью развития компьютерного управления и реализует различные технологии искусственного интеллекта. Они дают возможность мехатронной системе воспроизводить в той или иной мере интеллектуальные способности человека и на этой основе принимать решения о рациональных действиях для достижения цели управления. Наиболее эффективными технологиями интеллектуального управления в мехатронике являются технологии нечёткой логики, искусственных нейронных сетей и экспертных систем.
Применение интеллектуального управления даёт возможность обеспечить высокую эффективность функционирования мехатронных систем при отсутствии подробной математической модели объекта управления, при действии различных неопределённых факторов и при опасности возникновения непредвиденных ситуаций в работе системы.
Преимущество интеллектуального управления мехатронными системами состоит и в том, что часто для построения таких систем не требуются их подробная математическая модель и знание законов изменения действующих на них внешних воздействий, а управление строится на основе опыта действий высококвалифицированных специалистов-экспертов.