ГИРОСКО́П
-

Рубрика: Физика
-

-

Скопировать библиографическую ссылку:
ГИРОСКО́П (от греч. γῦρος – круг, окружность и σϰοπέω – наблюдать), устройство, совершающее быстрые циклические (вращательные или колебательные) движения и чувствительное вследствие этого к повороту в инерциальном пространстве. Термин «Г.» предложен в 1852 Ж. Б. Л. Фуко для изобретённого им прибора, предназначенного для демонстрации вращения Земли вокруг своей оси. Долгое время термин «Г.» использовался для обозначения быстровращающегося симметричного твёрдого тела. В совр. технике Г. – осн. элемент всевозможных гироскопич. устройств или приборов, широко применяемых для автоматич. управления движением самолётов, судов, торпед, ракет, космич. аппаратов, мобильных роботов, для целей навигации (указатели курса, поворота, горизонта, стран света), для измерения угловой ориентации подвижных объектов и во многих др. случаях (напр., при прохождении стволов штолен, строительстве метрополитенов, при бурении скважин).
Классический гироскоп
Согласно законам ньютоновской механики скорость поворота оси быстровращающегося симметричного твёрдого тела в пространстве обратно пропорциональна его собств. угловой скорости и, следовательно, ось Г. поворачивается столь медленно, что на некотором интервале времени её можно использовать в качестве указателя неизменного направления в пространстве.
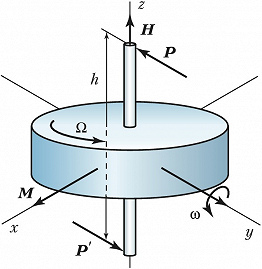

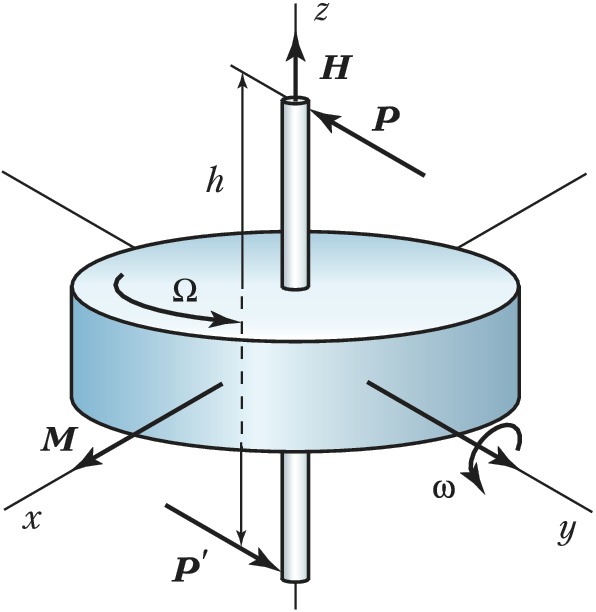
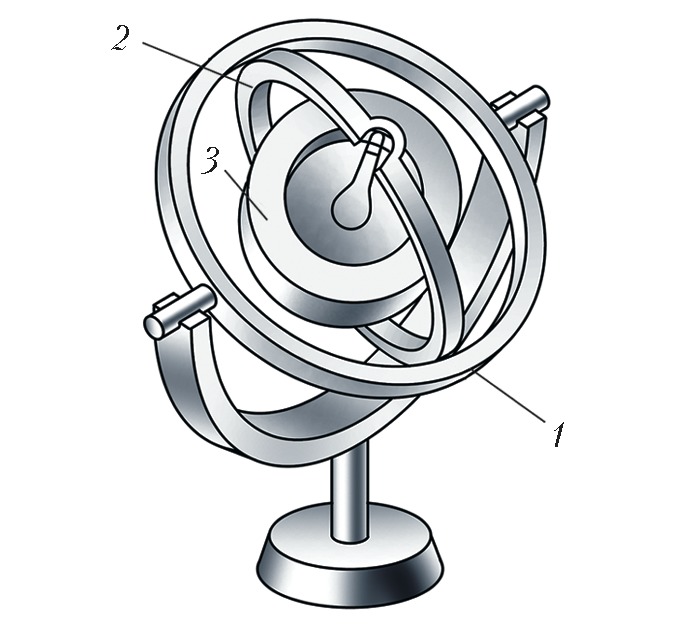
Простейшим Г. является волчок, парадоксальность поведения которого заключается в его сопротивлении изменению направления оси вращения. Под воздействием внешней силы ось волчка начинает двигаться в направлении, перпендикулярном вектору силы. Именно благодаря этому свойству вращающийся волчок не падает, а его ось описывает конус вокруг вертикали. Это движение называется прецессией Г. Если к оси быстро вращающегося свободного Г. приложить пару сил $\{\boldsymbol P, \boldsymbol P′\}, \boldsymbol P′=– \boldsymbol P$, с моментом $M=Ph$, где $h$ – плечо пары сил (рис. 1), то (против ожидания) Г. начнёт дополнительно поворачиваться не вокруг оси $x$, перпендикулярной к плоскости пары сил, а вокруг оси $y$, лежащей в этой плоскости и перпендикулярной оси $z$ вращения Г. Если в к.-л. момент времени действие пары сил прекратится, то одновременно прекратится прецессия, т. е. прецессионное движение Г. безынерционно. Чтобы ось Г. могла свободно поворачиваться в пространстве, Г. обычно закрепляют в кольцах карданового подвеса (рис. 2), который представляет собой систему твёрдых тел (рамок, колец), последовательно соединённых между собой цилиндрич. шарнирами. Обычно при отсутствии технологич. погрешностей оси рамок карданового подвеса пересекаются в одной точке – центре подвеса. Закреплённое в таком подвесе симметричное тело вращения (ротор) имеет три степени свободы и может совершать любой поворот вокруг центра подвеса. Г., у которого центр масс совпадает с центром подвеса, называется уравновешенным, астатическим или свободным. Изучение законов движения классич. Г. – задача динамики твёрдого тела.
Осн. количественной характеристикой ротора механич. Г. является его вектор собств. кинетич. момента, называемого также моментом количества движения или моментом импульса, $$\boldsymbol H=I\boldsymbol{\Omega}, \,\,\,(1)$$где $I$ – момент инерции ротора Г. относительно оси собств. вращения, $\boldsymbol \Omega$ – угловая скорость собств. вращения Г. относительно оси симметрии.
Медленное движение вектора собств. кинетич. момента Г. под действием моментов внешних сил, называемое прецессией Г., описывается уравнением$$\boldsymbol {\omega} × \boldsymbol H=\boldsymbol M,\,\,\,(2)$$где $\boldsymbol \omega$ – вектор угловой скорости прецессии, $\boldsymbol H$ – вектор собств. кинетич. момента Г., $\boldsymbol M$ – ортогональная к $\boldsymbol H$ составляющая вектора момента внешних сил, приложенных к гироскопу.
Момент сил, приложенных со стороны ротора к подшипникам оси собств. вращения ротора, возникающий при изменении направления оси и определяемый уравнением$$\boldsymbol {M}_g=–\boldsymbol{M}=\boldsymbol H×\boldsymbol \omega,\,\,\,(3)$$называется гироскопич. моментом.
Кроме медленных прецессионных движений ось Г. может совершать быстрые колебания с малой амплитудой и высокой частотой – т. н. нутации. Для свободного Г. с динамически симметричным ротором в безынерционном подвесе частота нутационных колебаний определяется формулой $$ν=H/A,$$где $A$ – момент инерции ротора относительно оси, ортогональной оси собств. вращения и проходящей через центр масс ротора. При наличии сил трения нутационные колебания обычно достаточно быстро затухают.
Погрешность Г. измеряется скоростью ухода его оси от первоначального положения. Согласно уравнению (2) величина ухода, называемого также дрейфом, пропорциональна моменту сил $M$ относительно центра подвеса Г.:$$ω_{yx}=M/H.\,\,\,(4)$$Уход $ω_{yx}$ обычно измеряется в угловых градусах в час. Из формулы (4) следует, что свободный Г. функционирует идеально лишь в том случае, если внешний момент $M$ равен 0. При этом угловая скорость прецессии обращается в нуль и ось собств. вращения будет в точности совпадать с неизменным направлением в инерциальном пространстве.
Однако на практике любые средства, используемые для подвеса ротора Г., являются причиной возникновения нежелательных внешних моментов неизвестных величины и направления. Формула (4) определяет пути повышения точности механич. Г.: надо уменьшить «вредный» момент сил $M$ и увеличить кинетический момент $H$. При выборе угловой скорости Г. необходимо учитывать одно из главных ограничений, связанных с пределами прочности материала ротора из-за возникающих при вращении центробежных сил. При разгоне ротора выше т. н. допускаемой угловой скорости начинается процесс его разрушения.
Лучшие совр. Г. имеют случайный уход порядка 10–4–10–5 °/ч. Ось Г. с погрешностью 10–5 °/ч совершает полный оборот на 360° за 4 тыс. лет! Точность балансировки Г. с погрешностью 10–5 °/ч должна быть выше одной десятитысячной доли микрометра (10–10 м), т. е. смещение центра масс ротора из центра подвеса не должно превышать величину порядка диаметра атома водорода.
Гироскопические устройства
можно разделить на силовые и измерительные. Силовые устройства служат для создания моментов сил, приложенных к основанию, на котором установлен гироскопич. прибор; измерительные предназначены для определения параметров движения основания (измеряемыми параметрами могут быть углы поворота основания, проекции вектора угловой скорости и т. п.).
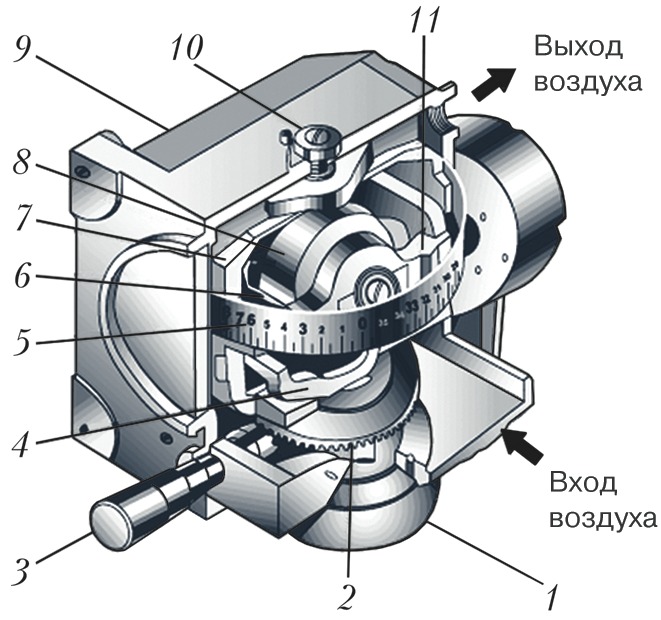
Впервые уравновешенный Г. нашёл практич. применение в 1898 в приборе для стабилизации курса торпеды, изобретённом австр. инженером Л. Обри. Аналогичные приборы в разл. вариантах исполнения начали использовать в 1920-х гг. на самолётах для указания курса (Г. направления, гирополукомпасы), а позднее для управления движением ракет. На рис. 3 показан пример применения гироскопа с тремя степенями свободы в авиац. указателе курса (гирополукомпасе). Вращение ротора в шарикоподшипниках создаётся и поддерживается струёй сжатого воздуха, направленной на рифлёную поверхность обода. По шкале азимута, прикреплённой к наружной рамке, можно, установив ось собств. вращения ротора параллельно плоскости основания прибора, ввести требуемое значение азимута. Трение в подшипниках незначительно, поэтому ось вращения ротора сохраняет заданное положение в пространстве. Пользуясь стрелкой, скреплённой с основанием, по шкале азимута можно контролировать поворот самолёта.
Гирогоризонт, или искусств. горизонт, позволяющий пилоту поддерживать свой самолёт в горизонтальном положении, когда естеств. горизонт не виден, основан на использовании Г. с вертикальной осью вращения, сохраняющей своё направление при наклонах самолёта. В автопилотах применяются два Г. с горизонтальной и вертикальной осями вращения; первый служит для сохранения курса самолёта и управляет вертикальными рулями, второй – для сохранения горизонтального положения самолёта и управляет горизонтальными рулями.
С помощью Г. созданы автономные инерциальные навигационные системы (ИНС), предназначенные для определения координат, скорости и ориентации подвижного объекта (корабля, самолёта, космич. аппарата и т. п.) без использования к.-л. внешней информации. В состав ИНС кроме Г. входят акселерометры, предназначенные для измерения ускорения (перегрузки) объекта, а также компьютер, интегрирующий по времени выходные сигналы акселерометров и выдающий навигационную информацию с учётом показания Г. К нач. 21 в. созданы настолько точные ИНС, что дальнейшего повышения точностей для решения мн. задач уже не требуется.
Развитие гироскопич. техники последних десятилетий сосредоточилось на поиске нетрадиц. областей применения гироскопич. приборов – разведка полезных ископаемых, предсказание землетрясений, сверхточное измерение координат ж.-д. путей и нефтепроводов, мед. техника и мн. другое.
Неклассические виды гироскопов
Высокие требования к точности и эксплутационным характеристикам гироскопич. приборов привели не только к дальнейшим усовершенствованиям классич. Г. с вращающимся ротором, но и к поискам принципиально новых идей, позволяющих решить проблему создания чувствит. датчиков для индикации и измерения угловых движений объекта в пространстве. Этому способствовали успехи квантовой электроники, ядерной физики и др. областей точных наук.
В гироскопе с воздушной опорой шариковые подшипники, используемые в традиц. кардановом подвесе, заменены «газовой подушкой» (газодинамич. опорой). Это полностью устранило износ материала опор во время работы и позволило почти неограниченно увеличить время службы прибора. К недостаткам газовых опор относятся довольно большие потери энергии и возможность внезапного отказа при случайном контакте ротора с поверхностью опоры.
Поплавковый гироскоп представляет собой роторный Г., в котором для разгрузки подшипников подвеса все подвижные элементы взвешиваются в жидкости с большой плотностью так, чтобы вес ротора вместе с кожухом уравновешивался гидростатич. силами. Благодаря этому на много порядков снижается сухое трение в осях подвеса и увеличивается ударная и вибрац. стойкость прибора. Герметичный кожух, выполняющий роль внутр. рамки карданового подвеса, называется поплавком. Ротор Г. внутри поплавка вращается на возд. подушке в аэродинамич. подшипниках со скоростью порядка 30–60 тыс. оборотов в минуту. Для повышения точности прибора необходимо использование системы термостабилизации. Поплавковый Г. с большим вязким трением жидкости называется также интегрирующим гироскопом.
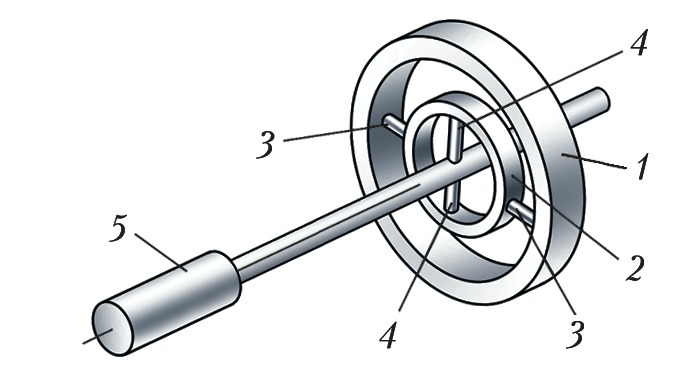
Динамически настраиваемый гироскоп (ДНГ) принадлежит к классу Г. с упругим подвесом ротора, в которых свобода угловых движений оси собств. вращения обеспечивается за счёт упругой податливости конструктивных элементов (напр., торсионов). В ДНГ, в отличие от классич. Г., используется т. н. внутр. карданов подвес (рис. 4), образованный внутр. кольцом 2, которое изнутри крепится торсионами 4 к валу электродвигателя 5, а снаружи – торсионами 3 к ротору 1. Момент трения в подвесе проявляется только в результате внутр. трения в материале упругих торсионов. В ДНГ за счёт подбора моментов инерции рамок подвеса и угловой скорости вращения ротора осуществляется компенсация упругих моментов подвеса, приложенных к ротору. К достоинствам ДНГ относятся их миниатюрность, отсутствие подшипников со специфич. моментами трения, присутствующими в классич. кардановом подвесе, высокая стабильность показаний, относительно невысокая стоимость.
Кольцевой лазерный гироскоп (КЛГ), называемый также квантовым гироскопом, создан на основе лазера с кольцевым резонатором, в котором по замкнутому оптич. контуру одновременно распространяются встречные электромагнитные волны. К достоинствам КЛГ относятся отсутствие вращающегося ротора, подшипников, подверженных действию сил трения, высокая точность.
Волоконно-оптический гироскоп (ВОГ) представляет собой волоконно-оптический интерферометр, в котором распространяются встречные электромагнитные волны. ВОГ является аналоговым преобразователем угловой скорости вращения основания, на котором он установлен, в выходной электрич. сигнал.
Волновой твердотельный гироскоп (ВТГ) основан на использовании инертных свойств упругих волн в твёрдом теле. Упругая волна может распространяться в сплошной среде, не изменяя своей конфигурации. Если возбудить стоячие волны упругих колебаний в осесимметричном резонаторе, то вращение основания, на котором установлен резонатор, вызывает поворот стоячей волны на меньший, но известный угол. Соответствующее движение волны как целого называется прецессией. Скорость прецессии стоячей волны пропорциональна проекции угловой скорости вращения основания на ось симметрии резонатора. К достоинствам ВТГ относятся: высокое отношение точность/цена; способность переносить большие перегрузки, компактность и небольшая масса, низкая энергоёмкость, малое время готовности, слабая зависимость от темп-ры окружающей среды.
Вибрационный гироскоп (ВГ) основан на свойстве камертона сохранять плоскость колебаний своих ножек. В ножке колеблющегося камертона, установленного на платформе, вращающейся вокруг оси симметрии камертона, возникает периодич. момент сил, частота которого равна частоте колебания ножек, а амплитуда пропорциональна угловой скорости вращения платформы. Поэтому, измеряя амплитуду угла закрутки ножки камертона, можно судить об угловой скорости платформы. К недостаткам ВГ относится нестабильность показаний из-за сложностей высокоточного измерения амплитуды колебаний ножек, а также то, что они не работают в условиях вибрации, которая практически всегда сопровождает места установки приборов на движущихся объектах. Идея камертонного Г. стимулировала целое направление поисков новых типов Г., использующих пьезоэлектрич. эффект либо вибрацию жидкостей или газов в специально изогнутых трубках и т. п.
Микромеханический гироскоп (ММГ) относится к Г. низких точностей (ниже 10–1 °/ч). Эта область традиционно считалась малоперспективной для задач управления движущимися объектами и навигации. Но в кон. 20 в. разработка ММГ стала одним из наиболее интенсивно разрабатываемых направлений гироскопич. техники, тесно связанным с совр. кремниевыми технологиями. ММГ представляет собой своеобразный электронный чип с кварцевой подложкой площадью в неск. квадратных миллиметров, на которую методом фотолитографии наносится плоский вибратор типа камертона. Точность совр. ММГ невелика и достигает 101–102 °/ч, однако решающее значение имеет исключительно низкая стоимость микромеханич. чувствит. элементов. Благодаря использованию хорошо отработанных совр. технологий массового производства микроэлектроники открывается возможность применения ММГ в совершенно новых областях: автомобили и бинокли, телескопы и видеокамеры, мыши и джойстики персональных компьютеров, мобильные робототехнич. устройства и даже детские игрушки.
Неконтактный гироскоп относится к гироскопич. устройствам сверхвысоких точностей (10–6–5· 10–4 H /ч). Разработка Г. с неконтактными подвесами началась в сер. 20 в. В неконтактных подвесах реализуется состояние левитации, т. е. состояние, при котором ротор Г. «парит» в силовом поле подвеса без к.-л. механич. контакта с окружающими телами. Среди неконтактных Г. выделяют Г. с электростатич., магнитным и криогенным подвесами ротора. В электростатич. Г. проводящий бериллиевый сферич. ротор подвешен в вакуумированной полости в регулируемом электрич. поле, создаваемом системой электродов. В криогенном Г. сверхпроводящий ниобиевый сферич. ротор подвешен в магнитном поле; рабочий объём Г. охлаждается до сверхнизких темп-р, так, чтобы ротор перешёл в сверхпроводящее состояние. Г. с магниторезонансным подвесом ротора является аналогом Г. с электростатич. подвесом ротора, в котором электрич. поле заменено магнитным, а бериллиевый ротор – ферритовым. Совр. Г. с неконтактными подвесами – это сложнейшие приборы, которые вобрали в себя новейшие достижения техники.
Кроме перечисленных выше типов Г. проводились и проводятся работы над экзотич. типами Г., такими, как ионный Г., ядерный гироскоп и др.
Математические задачи в теории гироскопа
Математич. основы теории Г. заложены Л. Эйлером в 1765 в его работе «Theoria motus corporum solidorum sue rigidorum». Движение классического Г. описывается системой дифференциальных уравнений 6-го порядка, решение которой стало одной из самых знаменитых математич. задач. Эта задача относится к разделу теории вращательного движения твёрдого тела и является обобщением задач, решаемых до конца простыми средствами классич. анализа. Однако при этом она настолько трудна, что ещё далека от завершения, несмотря на результаты, полученные крупнейшими математиками 18–20 вв. Совр. гироскопич. приборы потребовали решения новых математич. задач. Движение неконтактных Г. с высокой точностью подчиняется законам механики, поэтому, решая уравнения движения Г. с помощью компьютера, можно точно предсказывать положение оси Г. в пространстве. Благодаря этому разработчикам неконтактных Г. не приходится балансировать ротор с точностью 10–10 м, которую невозможно достичь при совр. уровне технологии. Достаточно точно измерять погрешности изготовления ротора данного Г. и вводить соответствующие поправки в программы обработки сигналов Г. Получающиеся с учётом этих поправок уравнения движения Г. оказываются очень сложными, и для их решения приходится применять весьма мощные компьютеры, использующие алгоритмы, основанные на последних достижениях математики. Разработка программ расчёта движения Г. с неконтактными подвесами позволяет существенно повысить точность Г., а следовательно, и точность определения местоположения объекта, на котором установлены эти гироскопы.
-
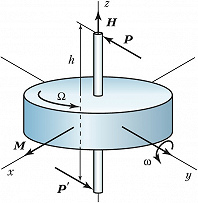 Рис. 1. Прецессия гироскопа. Угловая скорость прецессии 𝛚 направлена так, что вектор собственного кинетического момента H стремится к совмещению с вектором момента M пары сил {P, P'}, P'=–P, действующей на гироскоп.
Рис. 1. Прецессия гироскопа. Угловая скорость прецессии 𝛚 направлена так, что вектор собственного кинетического момента H стремится к совмещению с вектором момента M пары сил {P, P'}, P'=–P, действующей на гироскоп. -
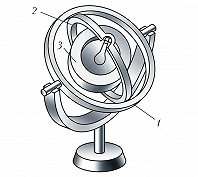 Рис. 2. Классический гироскоп в кардановом подвесе: 1 – внешнее кольцо; 2 – внутреннее кольцо; 3 – ротор.
Рис. 2. Классический гироскоп в кардановом подвесе: 1 – внешнее кольцо; 2 – внутреннее кольцо; 3 – ротор. -
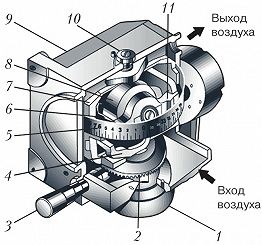
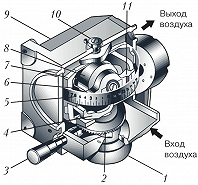 Рис. 3. Авиационный гироуказатель курса с воздушным приводом: 1 – основание; 2 – зубчатое колесо синхронизатора; 3 – ручка арретира; 4 – арретир; 5 – шкала азимута; 6 – воздушное сопло; 7 – наружная рамка; 8 – ротор; 9 – корпус; 10 – полуось наружной рамки с фиксаторной гайкой; 11 – внутренняя рамка. Арретир служит для удержания оси собственного вращения ротора в горизонтальном положении при вводе азимута по шкале.
Рис. 3. Авиационный гироуказатель курса с воздушным приводом: 1 – основание; 2 – зубчатое колесо синхронизатора; 3 – ручка арретира; 4 – арретир; 5 – шкала азимута; 6 – воздушное сопло; 7 – наружная рамка; 8 – ротор; 9 – корпус; 10 – полуось наружной рамки с фиксаторной гайкой; 11 – внутренняя рамка. Арретир служит для удержания оси собственного вращения ротора в горизонтальном положении при вводе азимута по шкале. -
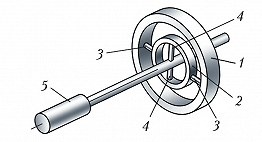
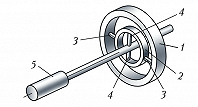 Рис. 4. Динамически настраиваемый гироскоп с внутренним кардановым подвесом: 1 – ротор; 2 – внутреннее кольцо; 3 и 4 – торсионы; 5 – электродвигатель.
Рис. 4. Динамически настраиваемый гироскоп с внутренним кардановым подвесом: 1 – ротор; 2 – внутреннее кольцо; 3 и 4 – торсионы; 5 – электродвигатель.