РАВНОВЕ́СИЯ СОСТОЯ́НИЕ
-

Рубрика: Физика
-

-

Скопировать библиографическую ссылку:
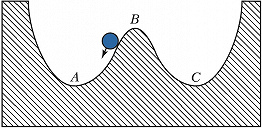
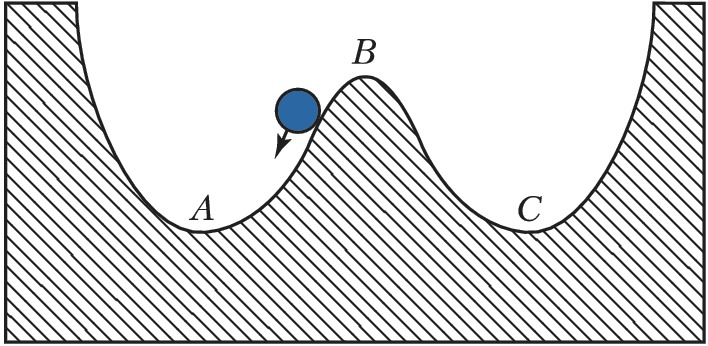
РАВНОВЕ́СИЯ СОСТОЯ́НИЕ, состояние системы, при котором все описывающие её переменные не изменяются во времени. Образом Р. с. в фазовом пространстве соответствующей динамической системы является точка. Р. с. могут быть грубыми (структурно устойчивыми) и негрубыми. Негрубые Р. с. исчезают в фазовом пространстве при сколь угодно малых изменениях параметров динамич. системы, грубые сохраняются даже при конечных изменениях параметров. Пример физич. системы с грубыми Р. с. – массивный шарик в жёлобе, состоящем из двух ямок (рис. 1). Здесь могут существовать три Р. с., когда шарик находится в положениях $A$, $B$ и $C$. Положение $B$ отвечает неустойчивому Р. с., т. к. при сколь угодно малых отклонениях шарик начинает двигаться и покидает окрестность этой точки. Иначе ведёт себя шарик, если изначально он покоился в точке $A$ или $C$. Получив отклонение, шарик начнёт двигаться с уменьшающейся за счёт трения скоростью и придёт в одно из состояний $A$ или $C$ в зависимости от величины отклонения, сохранив или изменив своё начальное Р. с. Таким образом, Р. с. может быть устойчивым по отношению к одним отклонениям и неустойчивым по отношению к другим.
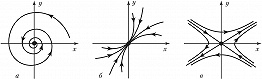
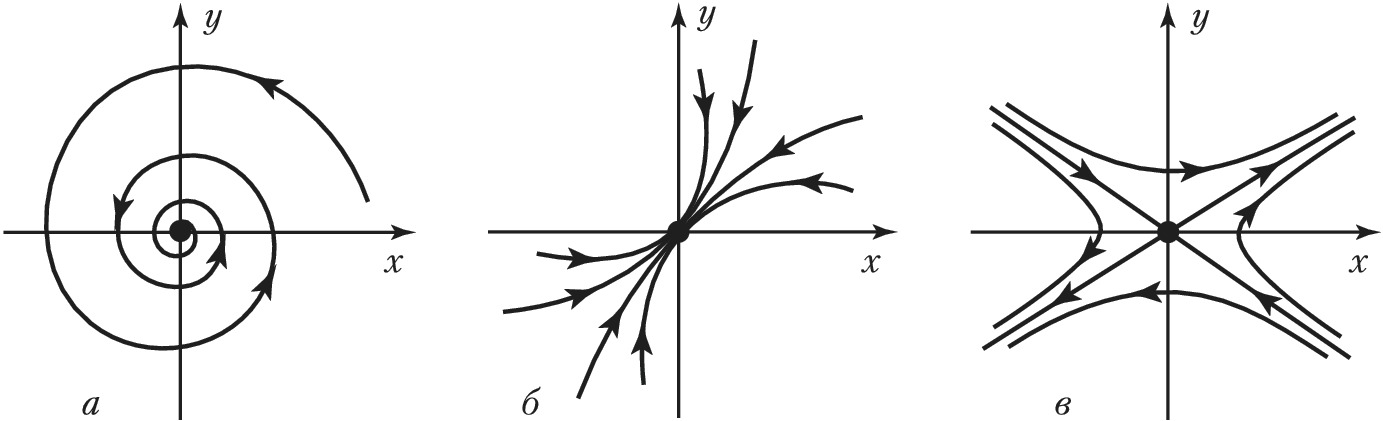
Пример системы с негрубыми Р. с. – массивный шарик на горизонтальной поверхности. Такая система имеет бесконечное число устойчивых Р. с., называемых безразлично устойчивыми. Отклонения шарика лишь переводят его в новое положение равновесия. Однако при небольшом изменении наклона поверхности рассмотренные Р. с. исчезают и положения шарика теряют устойчивость. С математич. точки зрения Р. с. асимптотически устойчиво, если все траектории, начинающиеся в его малой окрестности, приближаются к нему при $t→+∞$. Если же хотя бы одна из траекторий уходит из этой окрестности, Р. с. неустойчивое. Траектории, начинающиеся в малой окрестности грубого Р. с., ведут себя по-разному, соответственно выделяют разл. типы Р. с. Для динамич. систем на плоскости траектории могут возвращаться к Р. с. (или уходить от него), совершая либо не совершая при этом колебания. При наличии колебаний наблюдается Р. с. типа фокус (рис. 2, а); если колебания отсутствуют, наблюдаются Р. с. типа узел (рис. 2, б). Если по некоторым направлениям траектории стремятся к Р. с., а по другим уходят от него, то такое Р. с. называют седлом (рис. 2, в).