ПОГО́НИ ЛИ́НИЯ
-

Рубрика: Математика
-

-

Скопировать библиографическую ссылку:

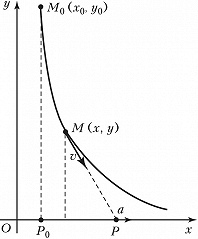
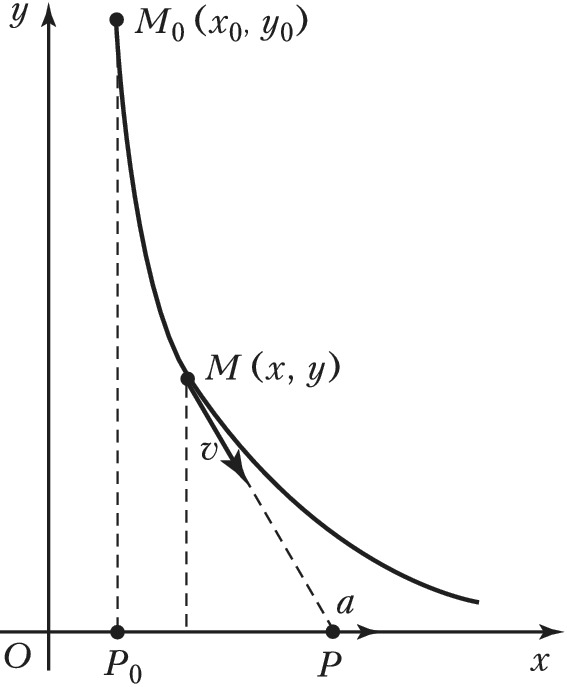
ПОГО́НИ ЛИ́НИЯ, кривая, являющаяся решением задачи о погоне, которая ставится следующим образом. По прямой $Ox$ с постоянной скоростью $a\gt 0$ движется точка $P$; в плоскости $Oxy$ движется точка $M(x,y)$ с постоянной по модулю скоростью так, что вектор скорости точки $M$ всегда направлен в точку $P$; траектория точки $M$ называется линией погони (рис.). Дифференциальное уравнение П. л. имеет вид $$y''=\frac{a}{v}\frac{y'^2}{y}\sqrt{1+y'^2},$$где $v$ – модуль скорости точки $M$. Решение этого уравнения даёт следующую связь между координатами точек П. л. $$x=\frac{y_0}{2(1+a/v)}\left[ \left( \frac{y}{y_0} \right)^{1+a/v} - 1\right] - \frac{y_0}{2(1-a/v)}\left[ \left( \frac{y}{y_0} \right)^{1-a/v} - 1\right]+x_0$$ при $v≠a$ и $$x=\frac{y_0}{4}\left[ \left( \frac{y}{y_0} \right)^2 - 1 \right] - \frac{y_0}{2}\ln \frac{y}{y_0}+x_0$$ при $v=a$, где $x_0,y_0$ – координаты точки $M$ в начальный момент времени, а точка $P$ имеет в этот момент координаты $x_0,0$. Если $v\gt a$, то $y$ убывает от $y_0$ до $0$, когда $x$ возрастает от $x_0$ до $x_1=x_0+y_0 \frac{av}{v^2-a^2}$, т. е. точка $M$ догоняет точку $P$ при $x=x_1$. В этом случае длина П. л. равна $y_0v^2/(v^2-a^2)$ и точка $M$ догоняет точку $P$ за время $T=y_0v/(v^2-a^2)$ (продолжительность погони). При $v\leqslant a$ точка $M$ не догоняет точку $P$. Известно обобщение задачи о погоне на случай, когда точка $P$ движется по кривой линии.
Задача о П. л. была поставлена Леонардо да Винчи, решена П. Бугером (1732).