ПЛАНЕТОХО́Д
-

Рубрика: Технологии и техника
-

-

Скопировать библиографическую ссылку:
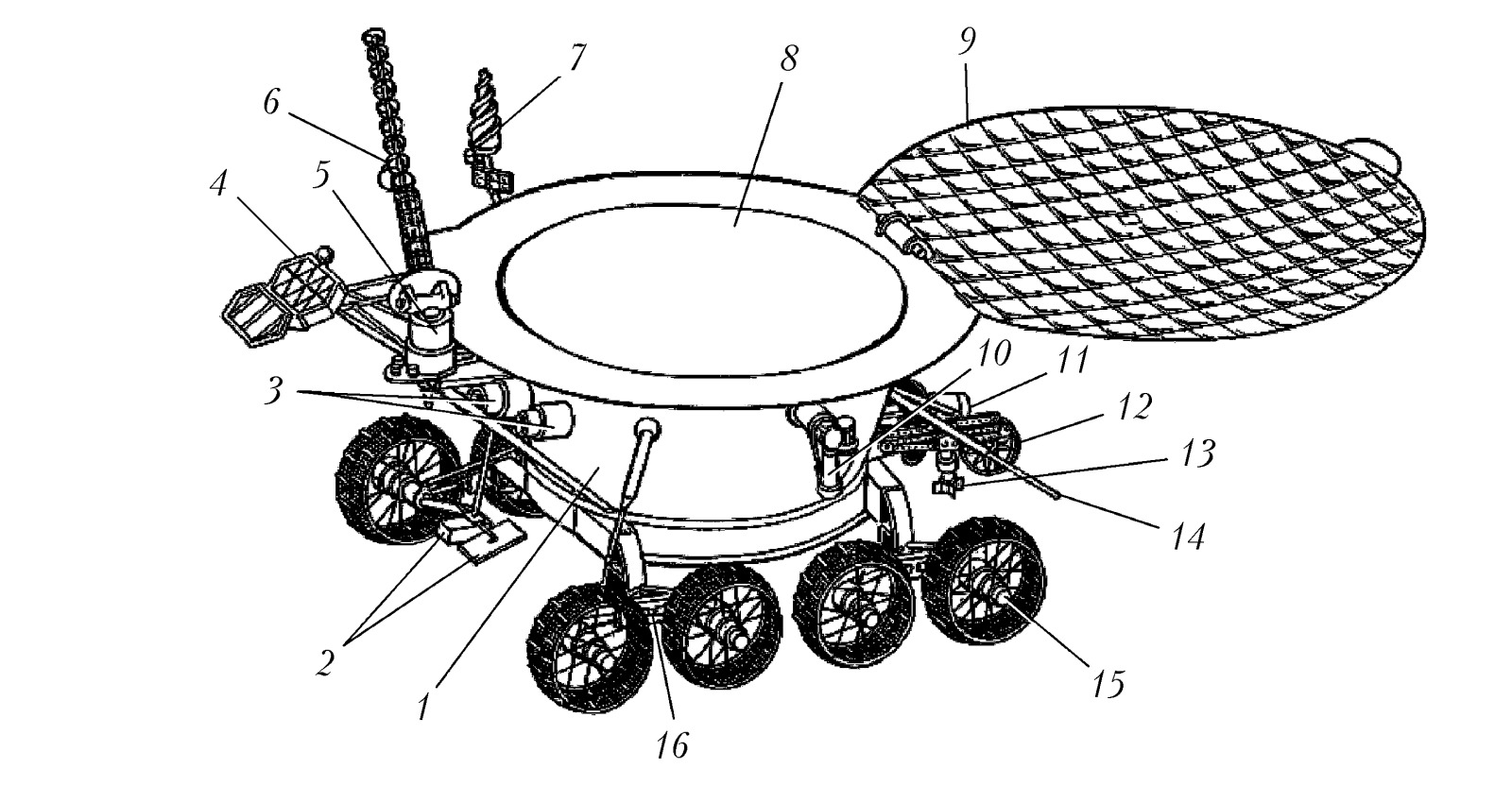
ПЛАНЕТОХО́Д, транспортное устройство, способное передвигаться по поверхности внеземного небесного тела (напр., планеты, астероида); управляется дистанционно или космонавтом. Первый в мире П. – дистанционно-управляемый самоходный аппарат «Луноход-1» – создан в 1970 в СССР в ОКБ Машиностроит. завода им. С. А. Лавочкина (г. Химки) под рук. Г. Н. Бабакина. «Луноход-1» был доставлен на поверхность Луны в район Моря Дождей 17.11.1970 сов. автоматич. межпланетной станцией «Луна-17» (стартовала 10.11.1970). Конструкция «Лунохода-1» (рис. 1) состоит из двух частей: герметичного (изготовленного из магниевых сплавов) приборного отсека с аппаратурой (несущая конструкция) и самоходного шасси, которое обеспечивало передвижение вперёд, назад, повороты на месте и в движении и состояло из ходовой части (торсионная подвеска, восьмиколёсный электрич. движитель – мотор-колесо и др.), системы безопасности движения, выносного блока аппаратуры (прибора и комплекса датчиков для определения механич. свойств грунта и оценки проходимости шасси) и др. В приборном отсеке размещались системы терморегулирования, электропитания, приборы системы дистанционного управления и электронно-преобразоват. устройства, науч. приборы и др. Для обогрева аппаратуры применялся радиоизотопный источник тепла, содержащий ампулы с 210Po. Солнечные батареи в течение лунного дня обеспечивали зарядку бортовых аккумуляторов. Масса «Лунохода-1» составляла 756 кг, диаметр по верхнему основанию корпуса – 2,15 м, высота – 1,92 м; длина шасси – 2,216 м; диаметр колёс – 0,51 м, ширина колёс – 0,2 м, ширина колеи – 1,60 м; макс. скорость – 4 км/ч. «Луноход-1» детально обследовал лунную поверхность на площади 80000 м2. С помощью телевизионных систем получено более 200 панорам и св. 20000 снимков поверхности. По трассе движения изучались физико-механич. свойства поверхностного слоя грунта, проводился анализ его химич. состава. Пройденное расстояние 10 км 540 м. Длительность активного функционирования «Лунохода-1» (с 17.11.1970 до 15.9.1971) составила 301 земные сут. 6 ч 37 мин. 16.1.1973 сов. межпланетная станция «Луна-21» доставила на поверхность Луны «Луноход-2» (масса 836 кг). На луноходе была установлена панорамная телевизионная камера, науч. приборы модернизированы и дополнены выносными магнитометром и астрофотометром. Активное функционирование П. продолжалось 113 сут; пройденное расстояние 37 км. Управление луноходами осуществлялось из Центра дальней космич. связи; осн. сложность составляла задержка в управлении, которая доходила до 24 с в зависимости от рельефа Луны. В результате экспедиций «Лунохода-1» и «Лунохода-2» были получены уникальные данные о структурных, прочностных и деформационных свойствах лунного грунта на обширной территории. Выполнен комплекс исследований магнитных полей и намагниченности лунных пород. Проведены эксперименты по лазерной локации Луны и пеленгации лунохода.
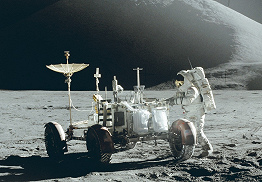
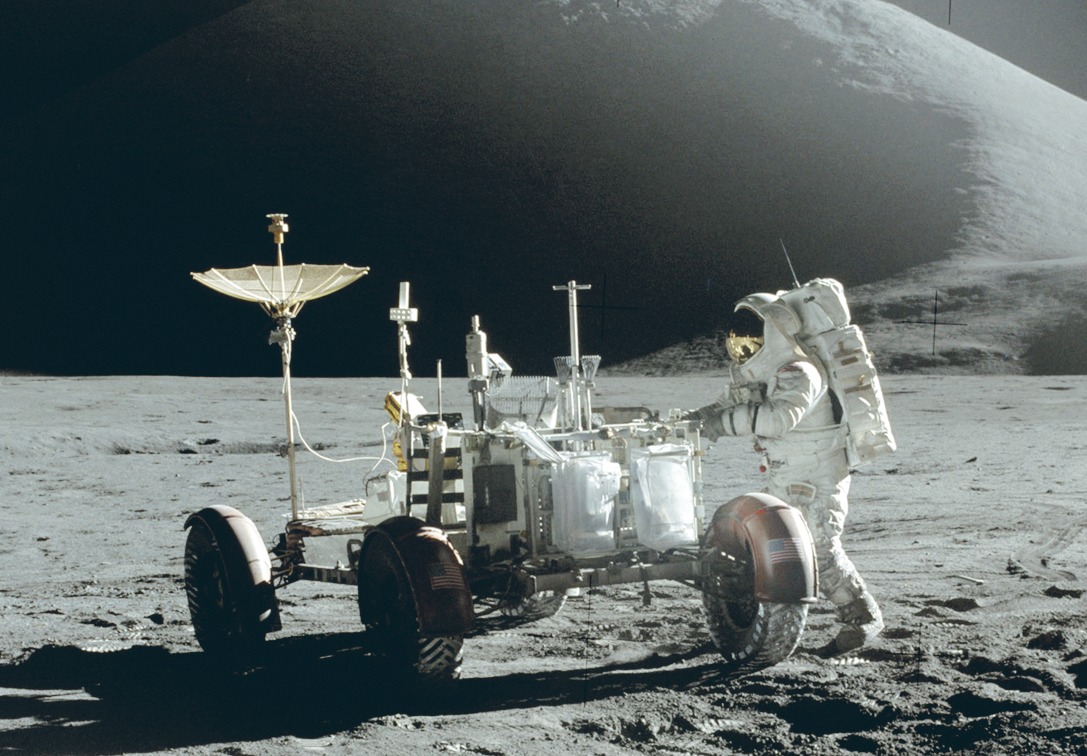
Первый амер. П. LRV (Lunar Rover Vehicle – лунное самоходное транспортное средство «Ровер»; рис. 2) доставил на Луну амер. КК «Аполлон-15» 30.7.1971. Четырёхколёсный, двухместный «Ровер» (первый управляемый космонавтом П.) размещался в сложенном состоянии в посадочной ступени лунной кабины. Комплект спец. радиотехнич. оборудования (лунный ретрансляционный блок) обеспечивал непосредственную связь космонавтов с Землёй. Источником питания служили серебряно-цинковые аккумуляторы. Масса LRV 725 кг (собственно луноход – 211, космонавты с ранцевыми системами жизнеобеспечения – 364, науч. приборы – 54, съёмочное и связное оборудование – 69, образцы лунных пород и др.). Длина лунохода 3,1 м, ширина 2,1 м, выс. 1,1 м, ширина колеи 1,83 м, макс. скорость 13 км/ч. При полётах КК «Аполлон-16» (посадка на Луну 21.4.1972) и «Аполлон-17» (11.12.1972) также использовался «Ровер». Расстояние, пройденное луноходом, составило при полёте «Аполлона-15» 27,2 км, «Аполлона-16» – 27,1 км, «Аполлона-17» – 35,7 км.
На поверхность Марса первые сов. марсоходы ПрОП-М (прибор оценки проходимости – Марс) предполагалось доставить при помощи автоматич. межпланетных станций «Марс-2» (27.11.1971) и «Марс-3» (2.12.1971), однако спускаемый аппарат «Марс-2» разбился при посадке, а «Марс-3» работал 20 с (предположительно вышел из строя из-за пылевой бури). Первый амер. марсоход «Соджорнер» («Sojourner» – «Пришелец», запуск 4.12.1996) доставлен на Марс 4.7.1997 при помощи ракеты-носителя «Дельта-2» (США) и посадочного аппарата «Mars Pathfinder». Масса марсохода ок. 15,5 кг, длина 0,65 м, ширина 0,48 м, выс. 0,3 м. Четырёхколёсный автоматич. П. «Соджорнер» мог удаляться от посадочного аппарата на расстояние ок. 500 м, сохраняя с ним радиосвязь; был оснащён 3 телекамерами и спектрометром (для исследования химич. состава поверхности). Управление осуществлялось с помощью 8-разрядного процессора Intel 80C85. Связь с Землёй П. поддерживал через посадочный модуль; последняя информация от него получена 27.9.1997.
В рамках проекта Mars Exploration Rover (MER) амер. марсоходы (близнецы) «Спирит» («Spirit», или MER-A, старт 10.6.2003) и «Оппортьюнити» («Opportunity», или MER-B, старт 7.7.2003) доставлены на Марс при помощи ракет-носителей «Дельта-2» (США) 4.1.2004 и 25.1.2004 соответственно. Каждый марсоход (шестиколёсный) с развёрнутыми панелями солнечных батарей и поднятой штангой имел длину 1,6 м, ширину 2,3 м, выс. 1,5 м, массу 185 кг. В корпусе размещались аккумуляторные батареи, 32-битный компьютер Rad-6000, служебная аппаратура и др. (для обогрева применялись радиоизотопный источник тепла и электронагреватели). Фотопреобразователи в течение дня на Марсе обеспечивали зарядку бортовых аккумуляторов. Связь со «Спиритом» прекратилась 22.3.2010. «Оппортьюнити» продолжает функционировать (производит геологич. анализ марсианской породы, передаёт данные о планетарных особенностях поверхности и др.).
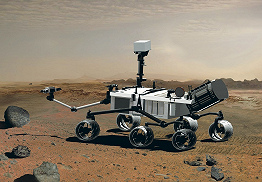
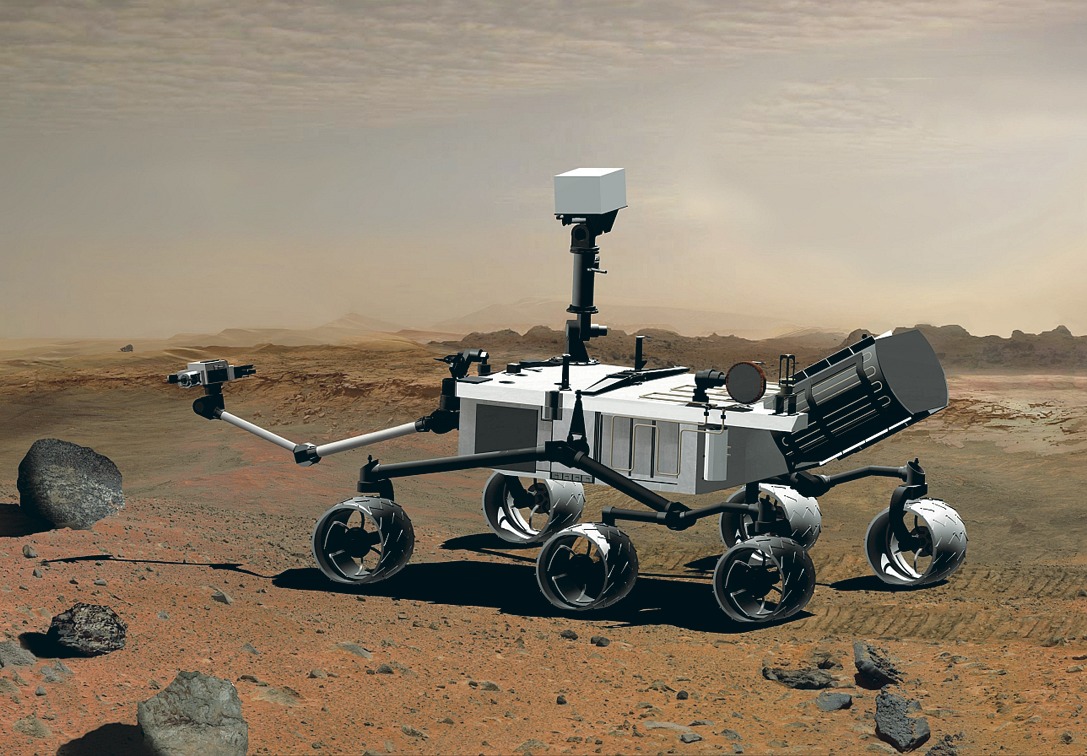
На Марс 6.8.2012 (амер. ракетоносителем «Атлас-5» и спускаемым аппаратом MSL) доставлен автоматич. шестиколёсный П. «Кьюриосити» («Curiosity», рис. 3). Масса марсохода 899 кг, длина 3 м, ширина 2,7 м, высота с установленной мачтой 2,1 м. Система движения «Кьюриосити» аналогична марсоходам MER, он имеет 6 ведущих колёс (4 из которых ориентируемые) диаметром 0,51 м с грунтозацепами. Для функционирования П. (и обогрева аппаратуры) применяется только радиоизотопный источник тепла. П. оснащён 2 бортовыми компьютерами, использующими процессоры RAD 750. На борту «Кьюриосити» установлено 12 видеокамер, 10 науч. приборов и инструментов (общей массой до 80 кг), которые позволяют проводить детальные геологич. и геохимич. исследования, изучать атмосферу и климат планеты, искать воду и её следы, органич. вещества и др. Для прямой связи с Землёй П. может использовать собств. антенну, однако большие объёмы данных обычно передаются через «Mars Odyssey» (2001) и «Mars Reconnaissance Orbiter» (2005; оба – США, на май 2014 функционируют).
Ведутся разработки П. для проведения исследований на Венере.
-
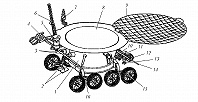 Рис. 1. Схема самоходного аппарата «Луноход-1»: 1 – корпус лунохода – герметичный приборный отсек; 2 – выносной блок аппаратуры; 3 – телекамеры; 4 – уголковый лазерный отражатель; 5 – привод остронаправленной антенны; 6 – остронаправленная антенна; 7 – коническая спиральная малонаправленная антенна; 8 – радиатор-охладитель приборного отсека; 9 – крышка приборного отсека – панель солнечной батареи; 10 – телефотометры; 11 – радиоизотопный источник тепловой энергии; 12 – девятое колесо – измеритель пройденного пути; 13 – прибор оценки проходимости для определения физико-механических свойств грунта; 14 – штыревая антенна; 15 – мотор-колесо; 16 – блок колёс шасси на торсионной подвеске.
Рис. 1. Схема самоходного аппарата «Луноход-1»: 1 – корпус лунохода – герметичный приборный отсек; 2 – выносной блок аппаратуры; 3 – телекамеры; 4 – уголковый лазерный отражатель; 5 – привод остронаправленной антенны; 6 – остронаправленная антенна; 7 – коническая спиральная малонаправленная антенна; 8 – радиатор-охладитель приборного отсека; 9 – крышка приборного отсека – панель солнечной батареи; 10 – телефотометры; 11 – радиоизотопный источник тепловой энергии; 12 – девятое колесо – измеритель пройденного пути; 13 – прибор оценки проходимости для определения физико-механических свойств грунта; 14 – штыревая антенна; 15 – мотор-колесо; 16 – блок колёс шасси на торсионной подвеске. -
 Рис. 2. Лунное самоходное транспортное средство «Ровер».
Рис. 2. Лунное самоходное транспортное средство «Ровер». -
 Рис 3. Марсоход «Кьюриосити».
Рис 3. Марсоход «Кьюриосити».